一 引言
在机器学习中,感知机 (perceptron)是二分类的线性分类模型,属于监督学习算法。输入为实例的特征向量,输出为实例的类别(取+1和-1)。感知机对应于输入空间中将实例划分为两类的分离超平面。感知机旨在求出该超平面,为求得超平面导入了基于误分类的损失函数,利用梯度下降法对损失函数进行最优化(最优化)。感知机的学习算法具有简单而易于实现的优点,分为原始形式和对偶形式。感知机预测是用学习得到的感知机模型对新的实例进行预测的,因此属于判别模型。感知机由Rosenblatt于1957年提出的。
在神经网络、支持向量机等算法盛行的当下,感知机模型应用得并不多,但必须承认,感知机却是神经网络和支持向量机的基础,所以还是很有必要学习一下的,本文接下来的内容将从感知机数学描述、损失函数、两种不同学习形式等方面详细介绍感知机,最后使用Python实现感知机两种学习形式。
二 感知机模型及损失函数
2.1 定义
对于给定训练样本数据集 , 表示训练样本的特征向量, 表示样本类别。 与 之间的如下函数关系:
称为感知机。其中, 称为感知机的权值系数或者权值向量weight , 称为偏置bias , 表示 和 的点积
是符号函数,有:
从定义上可以看出,感知机最终目标就是求解出 和 。我们可以从几何上对感知机进行理解,如果以 为法向量,以 为截距,可以确定一超平面:
通过这一超平面,可以顺利将对数据集进行划分。
以二维数据为例,如下图所示,当样本点 刚好落在超平面上时,有 ,当 落在超平面下方时,有 ,通过 函数后输出为 ,也就是标记为 类;当 落在超平面上方时,有 ,通过 函数后输出为 ,也就是标记为 类。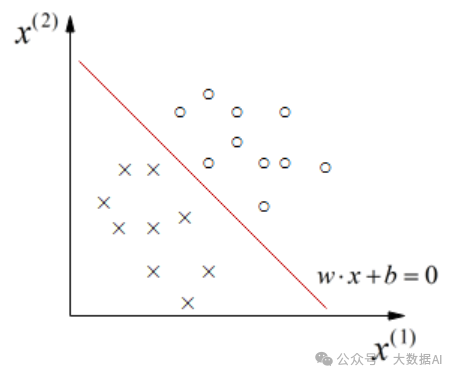
注意,这样的超平面一般不唯一,也就是说感知机最终解可以有很多个,受参数初始值、训练样本输入顺序等因素的影响,每次训练时所获得的超平面都可能不一样。
2.2 损失函数
为了求解参数 和 ,确定最终的分割超平面,我们需要定义一个目标函数或者说损失函数,通过最小化损失函数来达到目的。在感知机模型中,以误分类的样本对象与分割超平面间的距离之和最为损失函数。我们高中时学过,对于点 ,到平面 的距离为:
将这一公式扩展到超平面中,对于超平面 ,误分类点 到超平面的距离为:
式中, 是 的 范数,等同于上面的 。为了方便计算,我们需要将分子中的绝对值去掉,怎么去掉呢?因为 是误分类样本点, 与 一定是异号的,所以:
且因为 ,所以:
于是, 到超平面的距离可以表示为:
假设 是所有误分类点组成的集合,那么所有误分类点到超平面距离总和为: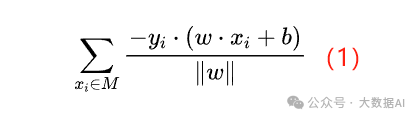
这就是我们需要的损失函数的雏形了,之所以说是雏形,是因为我们还可以通过令 对上式进一步化简,于是有:
就是我们最终需要的损失函数。
为什么可以直接令
来化简式(1)呢?
我们可以在权值向量 中添加一个 元素,在特征向量 中添加一个第0纬度 ,令偏置 ,这样,我们就把偏置 也放进了权值向量 中,那式(1)就变为:
此时,分子和分母都含有 ,当分子的 扩大 倍时,分母的 范数也会扩大N倍。也就是说,分子和分母有固定的倍数关系。那么我们可以固定分子或者分母为1,然后求分母的倒数或者分子自己的最小化作为损失函数,这样可以简化我们的损失函数。在感知机模型中,采用的是保留分子的策略。
另一种解释,当把偏置 包含进 后,超平面表达式也简化成 ,无论是把 扩大多少倍、缩小多少倍,都对超平面没有影响(就像 与 始终表示同一条直线),那么我们总能找到一个倍数,将 缩小到满足 ,但并不影响我们获得最终的超平面,但是令 后却有助于我们化简和求解。
三 优化方法
上一节中,我们介绍了感知机模型损失函数 的由来,接下来就要说说怎么通过优化损失函数来获得最终的超平面。在感知机模型中,有两种优化方式:原始形式和对偶形式。
3.1 原始形式
原始形式采用的是梯度下降法进行求解,如果对梯度下降法不了解,可以参看前面写过的一篇梯度下降法。这里需要注意的是,在上一小节中说过,感知机是基于误分类驱动的一种模型,所以不能使用整个数据集进行梯度下降优化,只能对误分类样本集合 采用随机梯度下降法或者小批量梯度下降法进行优化。对损失函数 求偏导:
那么, 的梯度下降迭代公式为:
偏置 的梯度下降迭代公式为:
式中, 是学习率。感知机模型中,一般采用随机梯度下降法进行优化,每次使用一个误分类样本点进行梯度更新。假设 是 中的一个误分类点,进行梯度更新:
总结一下原始形式优化步骤。
输入:训练样本数据集 , , ,学习率%
输出: , ;感知机模型
-
初始化 , ;
-
在 中选取任意点 ;
-
通过 的值判断是否是误分类点,如果是,使用式(3)、(4)更新参数;
-
回到步骤2直到准确率满足条件。
3.2 对偶形式
对偶形式时原始形式在执行效率上的优化。通过3.1小节中,我们知道,每当一个样本点 被错误分类一次时,都会使用式(3)(4)更新一次参数,那么,如果样本点 在迭代过程中被错误分类多次(假设 次),那么就回有 次参与到参数更新中,我们假设参数 和 的初始值都为0向量,那么,最终获得的参数 和 为:
这是在对偶形式中的参数更新方式,式中, 。另外,在原始形式中,我们使用 来判断样本点 是否被错误分类,将式(5)(6)代入这一判别式中,得:

在对偶形式中,采用式(7)判断样本点是否正确分类,观察后可以发现,式(7)中有两个样本点 和 内积计算,这个内积计算的结果在下面的迭代过程中需要多次被重复使用,如果我们事先用矩阵运算计算出所有的样本之间的内积,那么在算法迭代过程中, 仅仅一次的矩阵内积运算比原始形式中每遍历一个样本点都要计算 与 的内积要省时得多,这也是对偶形式的感知机模型比原始形式优的原因。
在感知机模型中,样本的内积矩阵称为Gram矩阵,它是一个对称矩阵,记为 。总结一下对偶形式的步骤。
输入:训练样本数据集 , , ,学习率%
输出: , ;感知机模型
(1)初始化所有 值为0;
(2)计算Gram矩阵;
(3)在 中选取任意点 ;
(4)如果,令 ;
(5)检查是否还有误分类样本点,如果有,回到步骤(2);如果没有,(5)(6)计算 、 最终值。
四 算法实现
# 导入包
import numpy as np
import matplotlib.pyplot as plt
import copy
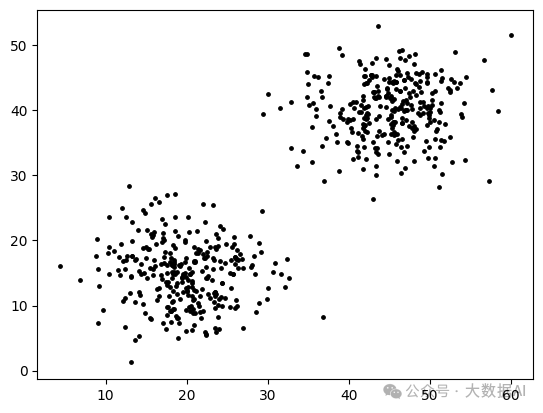
# 先来制造一批数据
a = np.random.normal(20,5,300)
b = np.random.normal(15,5,300)
cluster1 = np.array([[x, y, -1] for x, y in zip(a,b)])
a = np.random.normal(45,5,300)
b = np.random.normal(40,5,300)
cluster2 = np.array([[x, y, 1] for x, y in zip(a,b)])
dataset = np.append(cluster1,cluster2, axis=0)
for i in dataset:
plt.scatter(i[0], i[1],c='black',s=6)
plt.show()
len(dataset)
600
class Perception(object):
def init(self):
"""
感知机模型
"""
self.w = 0
self.b = 0
def fit_raw_mod(self, train_data, lr=1, max_epoch=None, min_error_rate=0):
"""
原始模式的感知机训练方法,当达到最大迭代次数或错误率降到最小范围退出
train_data:训练数据集
lr:学习率
max_epoch:最大迭代次数
min_error_rate:最小错误率
"""
self.w = np.zeros(train_data.shape[1]-1) # 根据训练集维度初始化权重系数
epoch = 1 # 记录迭代次数
while True:
error_count = 0 # 记录错误分类样本数
for sample in train_data:
xi = sample[0:-1]
yi = sample[-1]
distance = yi * (self.w @ xi + self.b) # yi*(w⋅xi*+b)
if distance <= 0: # 对于判断错误的样本点
self.w += lr * sample[-1] * sample[0:-1]
self.b += lr * sample[-1]
error_count += 1
# 每完成一次迭代之后,验证一次准确率,准确率达标则退出
current_error_rate = float(error_count) / train_data.shape[0]
# print('epoch {0},current_error_rate: {1}'.format(epoch+1, current_error_rate))
# print('w:{0}, b:{1}'.format(self.w, self.b))
# self.show_graph(train_data) # 每一次迭代都展示一次图像
if current_error_rate <= min_error_rate:
break
if isinstance(max_epoch, int) and epoch >= maxepoch:
break
epoch += 1
print('w:{0}, b:{1}'.format(self.w, self.b))
self.show_graph(train_data)
def fit_dual_mod(self,train_data,lr=1):
"""
对偶模式的感知机训练方法
train_data:训练数据集
lr:学习率
"""
x_train = train_data[:,:-1]
y_train = train_data[:,-1]
num_samples, num_features = x_train.shape
beta = np.zeros((num_samples,))
self.b = 0
# 计算 Gram 矩阵
gram = np.dot(x_train, x_train.T)
while True:
error_count = 0
for i in range(num_samples):
inner_product = gram[i]
y_i = y_train[i]
distance = y_i * (np.sum(beta * y_train * inner_product) + self.b)
# 对于误分类点,修正 beta 和 偏置b,跳出本层循环,重新遍历数据计算,开始新的循环
if distance <= 0:
error_count += 1
beta[i] = beta[i] + lr
self.b = self.b + lr * y_i
break
# 数据没有误分类点,跳出 while 循环
if error_count == 0:
break
self.w = np.sum(beta * y_train * x_train.T, axis=1) # 计算w参数最终值
print('w:{0}, b:{1}'.format(self.w, self.b))
self.show_graph(train_data) # 展示图像
def predict(self, sample):
"""
输入一个样本点,判断是-1类还是+1类
sample:样本点
"""
output = self.w @ sample + self.b
return 1 if output >= 0 else -1
def show_graph(self, train_data):
"""
把训练出来的超平面图像展示出来
"""
for sample in train_data:
if sample[-1] == 1:
plt.scatter(sample[0], sample[1],c='black',s=6)
else:
plt.scatter(sample[0], sample[1],c='red',s=6)
x = np.linspace(0.,60.,200)
y = -(self.w[0]*x + self.b) / self.w[1]
plt.plot(x,y)
plt.show()
# 创建模型
model = Perception()
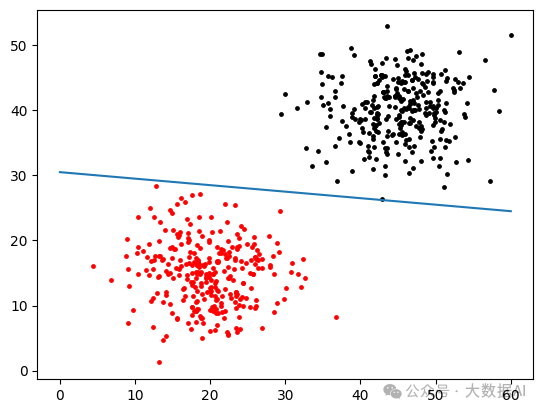
model.fit_raw_mod(dataset, lr=1)
w:[ 5.32765856 53.28693893], b:-1625.0
model = Perception()
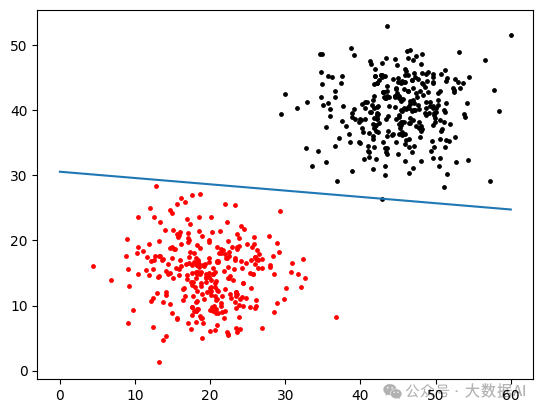
model.fit_dual_mod(dataset, lr=1)
w:[ 5.00139101 51.70138198], b:-1580.0
model.predict(np.array([20,30]))
1
model.predict(np.array([50,50]))
1