简介 {#简介}
在 ROS 中提供的五种基于 2D 激光 的 SLAM 算法:
- HectorSLAM
- Gmapping
- KartoSLAM
- CoreSLAM
- LagoSLAM
最后还有比较经典的 google 开源的 cartographer,虽然不是基于 ROS 的但是大牛们已经将它修改为基于 ROS 的版本的 cartographer_ros
(1)HectorSLAM {#(1)HectorSLAM}
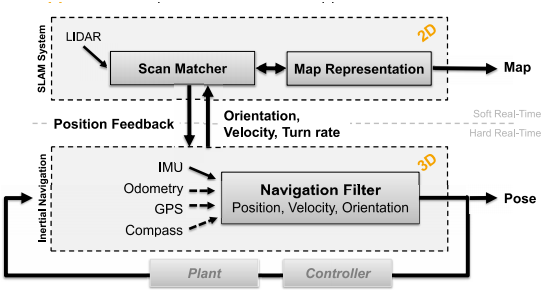
HectorSLAM 是一种结合了鲁棒性较好的扫描匹方法 2D SLAM 方法和使用惯性传感系统的导航技术。
传感器的要求:高更新频率小测量噪声的激光扫描仪,不需要里程计,使空中无人机与地面小车在不平坦区域运行存在运用的可能性,作者利用现代激光雷达的高更新率和低距离测量噪声,通过扫描匹配实时地对机器人运动进行估计。
所以当只有低更新率的激光传感器时,即便测距估计很精确,对该系统都会出现一定的问题,如下图是该系统生成的二维地图。
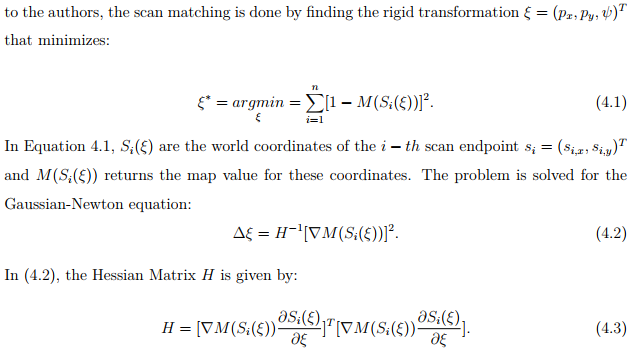
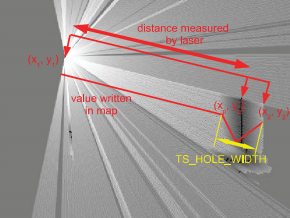
利用已经获得的地图对激光束点阵进行优化,,估计激光点在地图的表示,和占据网格的概率,其中扫描匹配利用的是高斯牛顿的方法进行求解. 找到激光点集映射到已有地图的刚体转换(x,y,theta).具体的公式如下:
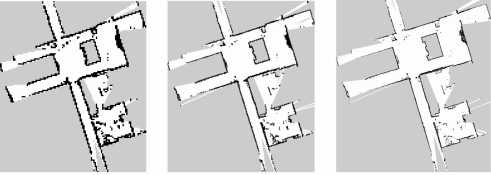
下图二维地图是 hectorSLAM 多分辨率地图的表示。
网格单元格长度(从左到右):20厘米,10厘米和5厘米 ,使用多分辨率地图表示,以避免陷入局部最小化。 这个解决方案背后的想法是在内存中有不同的地图,同时使用之前估计的姿势来更新它们。 计算成本 仍然很低,所以地图总是一致的
最后,3D 空间导航状态估计是基于 EKF 滤波器。 但是,这种情况是仅在 IMU 存在时才需要,例如在空中机器人的情况下。 因此,这里我们只讨论二维的 SLAM
它会将不再这项工作中使用。如下图显示了HectorSLAM方法的概述。
(2)Gmapping {#(2)Gmapping}
Gmapping 是一种基于激光的 SLAM 算法,它已经集成在 ROS 中,是移动机器人中使用最多的 SLAM 算法。这个算法已经由Grisetti等人提出是一种基于 Rao-Blackwellized 的粒子滤波的 SLAM 方法。
基于粒子滤波的算法用许多加权粒子表示路径的后验概率,每个粒子都给出一个重要性因子。但是,它们通常需要大量的粒子才能获得比较好的的结果,从而增加该算法的的计算复杂性。此外,与PF重采样过程相关的粒子退化耗尽问题也降低了算法的准确性。粒子退化问题包括在重采样阶段从样本集粒子中消除大量的粒子。发生这种情况是因为它们的重要性权重可能变得微不足道。因此,这意味着有一定的小概率时间会消除正确的假设的粒子。为了避免粒子的退化问题,已经开发了自适应重采样技术。
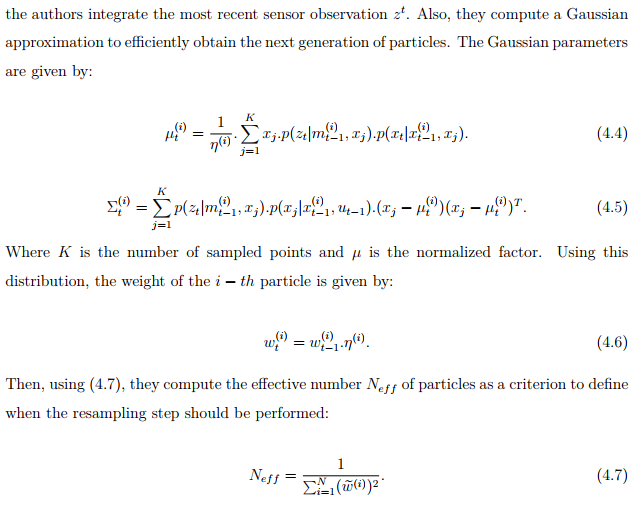
作者还提出了一种计算精确分布的方法,不仅考虑机器人平台的运动,还考虑最近的观察。提出了在使用测距运动模型时结合观测值提出建议分布。然而,当一个移动机器人装备一个非常精确的传感器LRF时,可以使用该传感器的模型,因为它可以实现了极高的似然函数。 基于此,作者整合了最近的传感器观测zt,并且他们计算高斯分布近似有效地获得下一代粒子分布。
这种自适应重采样降低了PF预测步骤中机器人姿态的不确定性。 结果,由于扫描匹配过程,所需的粒子数量减少,因为不确定性较低。 实验中,Gmapping使用的粒子数量是30,与普通PF方法相比,这是非常低的。
(3)LagoSLAM {#(3)LagoSLAM}
LagoSLAM 是线性近似图优化,不需要初始假设。基本的图优化slam的方法就是利用最小化非线性非凸代价函数.每次迭代, 解决局部凸近似的初始问题来更新图配置,过程迭代一定次数直到局部最小代价函数达到. (假设起始点经过多次迭代使得局部代价函数最小). 。假设图中每个节点的相对位置和方向都是独立的,作者求解了一个等价于非凸代价函数的方程组。为此,提出了一套基于图论的程序,通过线性定位和线性位置估计,得到非线性系统的一阶近似。
(4)KartoSLAM {#(4)KartoSLAM}
KartoSLAM是基于图优化的方法,用高度优化和非迭代 cholesky矩阵进行稀疏系统解耦作为解.图优化方法利用图的均值表示地图,每个节点表示机器人轨迹的一个位置点和传感器测量数据集,箭头的指向的连接表示连续机器人位置点的运动,每个新节点加入,地图就会依据空间中的节点箭头的约束进行计算更新.
KartoSLAM的ROS版本,其中采用的稀疏点调整(the Spare Pose Adjustment(SPA))与扫描匹配和闭环检测相关.landmark越多,内存需求越大,然而图优化方式相比其他方法在大环境下制图优势更大.在某些情况下KartoSLAM更有效,因为他仅包含点的图(robot pose),求得位置后再求map.
(5)CoreSLAM {#(5)CoreSLAM}
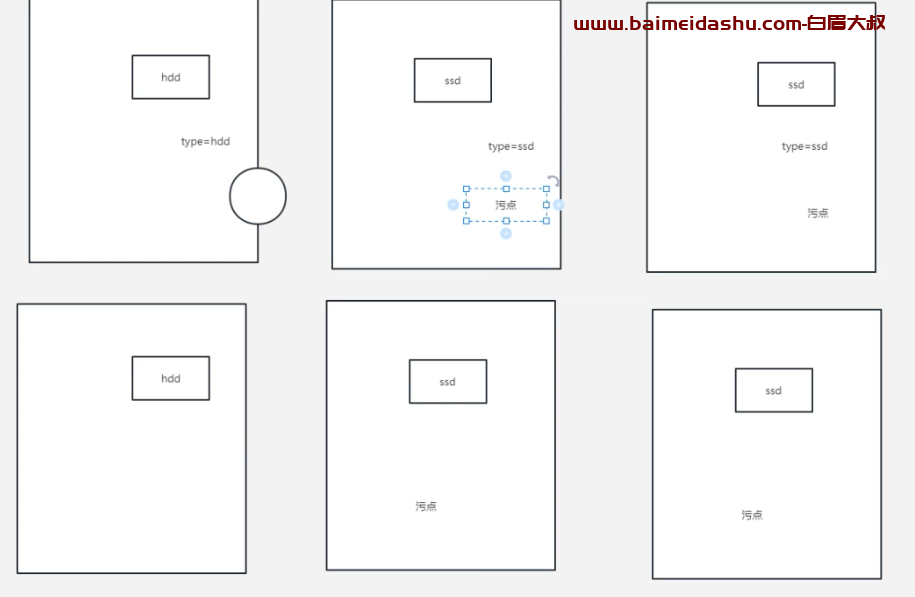
COreSLAM最小化性能损失的一种slam算法.将算法简化为距离计算与地图更新的两个过程, 第一步,每次扫描输入,基于简单的粒子滤波算法计算距离,粒子滤波的匹配器用于激光与地图的匹配,每个滤波器粒子代表机器人可能的位置和相应的概率权重,这些都依赖于之前的迭代计算. 选择好最好的假设分布,即低权重粒子消失,新粒子生成..在更新步骤,扫描得到的线加入地图中,当障碍出现时,围绕障碍点绘制调整点集,而非仅一个孤立点。
(6)cartographer {#(6)cartographer}
cartographer是Google的实时室内建图项目,传感器安装在背包上面,可以生成分辨率为5cm的2D格网地图。获得的每一帧laser scan数据,利用 scan match 在最佳估计位置处插入子图(submap)中,且scan matching只跟当前submap有关。在生成一个submap后,会进行一次局部的回环(loop close),利用分支定位和预先计算的网格,所有submap完成后,会进行全局的回环。
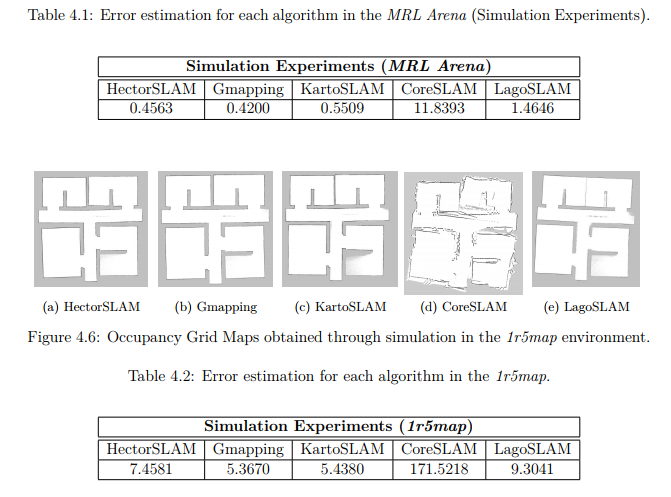
各种激光测距仪的 SLAM 的算法的对比: {#各种激光测距仪的-SLAM-的算法的对比:}


![[XSS神器]XssEncode chrome插件 - 0x_Jin](https://img1.51tbox.com/static/2024-11-08/INZETIVKFAeC.jfif)